1.1 ESP8266 개요 c{mpy0101}
ESP8266은 Espressif Systems 라는 상하이 소재 중국 회사에서 2014년도에 출시한 마이크로 컨트롤러이다.
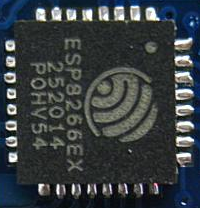
[그림] ESP8266
ESP8266은 다음과 같은 물리적인 스펙을 가지고 있다.
Voltage : 3.3V
Current consumption : 10uA – 170mA
Flash memory attachable : 16MB max (512K normal)
Processor : Tensilica L106 32 bit
Processor speed : 80-160MHz
RAM : 32K + 80K
GPIOs : 17 (multiplexed with other functions)
ADC(Analog to Digital) : 1 input with 1024 step resolution
802.11 support : b/g/n/d/e/i/k/r
Maximum concurrent TCP connections : 5
스펙을 보면 알겠지만 이 칩만으로도 독립된 프로세서 보드를 구성할 수 있는 충분한 기능이 내장되어 있다. Wi-Fi 기능을 내장하고 있으면서도 저렴한 가격 때문에 무선인터넷 기반의 제품을 만드는 경우 무선모듈로 널리 사용되고 있으며 아두이노(arduino)와 같은 보드와 시리얼통신으로 연결하여 무선인터넷 기능을 구현할 수 있다.


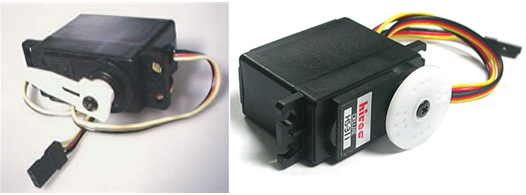
[그림] ESP-01모듈(좌)과 ESP-12모듈(우)
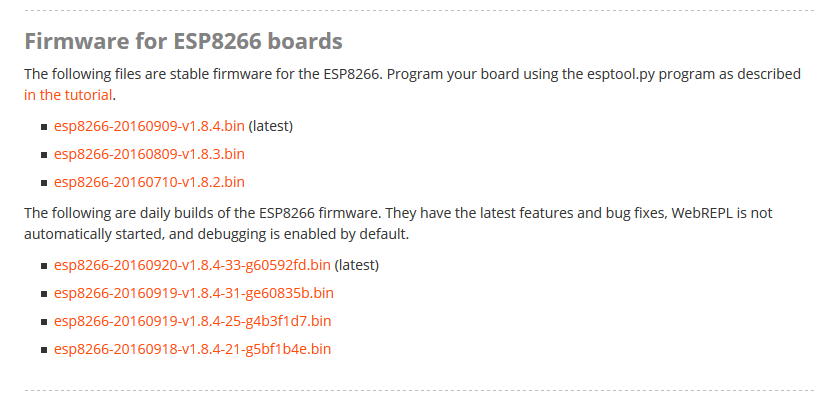
특히 주목할만한 것은 Lua(eLua) 나 python(MicroPython) 혹은 javascript 같은 스크립트 언어로 제어할 수 있게끔 해주는 펌웨어도 존재한다는 점이다. 이는 c++ 기반으로 개발하는 것 보터 훨씬 더 편리한 환경에서 개발을 진행할 수 있다는 것을 의미하며 ESP-12 모듈 기반의 NodeMCU, WeMos 등등 다양하고 저렴한 응용 보드가 제작되어 널리 사용되고 있다.
NodeMCU보드 | WeMos d1 mini 보드 |

이러한 보드에 eLua나 MicroPython 과 같은 펌웨어를 올려서 Lua 혹은 python으로 보드와 주변 기기들을 제어할 수 있다.
'하드웨어 > ESP8266' 카테고리의 다른 글
| WeMos d1 mini 보드 (0) | 2016.10.13 |
|---|---|
| MicroPython으로 아날로그입력 받기 (0) | 2016.10.12 |
| nodemcu의 pwm 기능으로 서보모터 제어하기 (0) | 2016.10.12 |
| NodeMCU를 이용한 LED의 fading 예제 (0) | 2016.10.11 |
| NodeMCU보드에서 PWM파형 생성하기 (0) | 2016.10.05 |