4.1 함수발생기 개요
함수 발생기는 정현파, 삼각파, 구형파, 램프파, 펄스파 등의 파형을 발생시키며, 발생 파형의 주파수와 크기를 가변 할 수 있는 장치로서 전기전자 관련 실험에 기본적으로 사용되는 장비이다. 본 실험에서 사용하는 함수 발생기의 특징은 다음과 같다.
출력 주파수 대역 : 0.1Hz - 3MHz
출력 파형은 정현파, 삼각파, 구형파 등으로 가변 가능
TTL LEVEL 의 구형파 출력 기능
전압 크기 제어(Vpp=10V)
구형파 듀티 비 제어
출력 파형 ON/OFF 제어
최대 감쇄비는 55dB 까지 감쇄
출력 주파수를 6 DIGIT 녹색 LED에 표시
그림 3.1은 본 실험에서 사용하는 함수 발생기의 전면부를 보여준다.

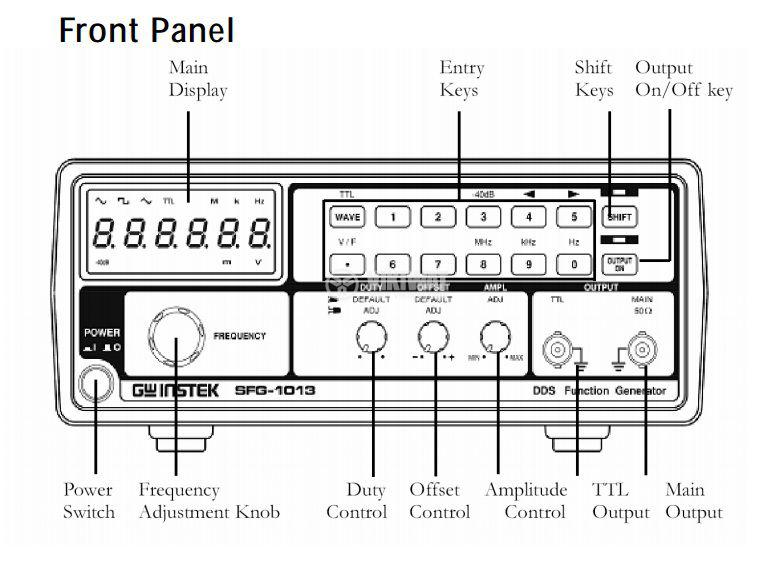
각 부분의 기능에 대한 설명은 다음과 같다.
1) Main Display
7 Segment LED : 주파수 표시
TTL 표시 : TTL 출력 상태 표시
파형 표시 :
정현파, 구형파, 삼각파 중 출력 파형 형태 표시
주파수 표시 :
출력 주파수 단위 (MHz, kHz, Hz) 표시
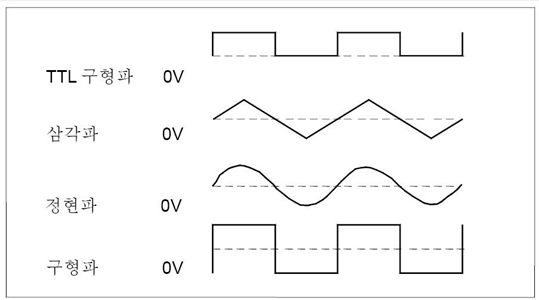
[그림] 그림 3.2 함수발생기의 발생 파형
2) 입력 키
Waveform Key :
정현파, 구형파, 삼각파 중에서 파형 선택
TTL 동작 :
TTL 출력 선택
숫자 키 :
주파수 선택
주파수 단위 선택 :
주파수 단위 (MHz, kHz, Hz) 선택
커서 선택 :
주파수 수정을 위해 커서 이동
3) 주파수 조정 노브 : 주파수 증가 감소 조정 노브
4) TTL 출력 : BNC 케이블을 통해 TTL 신호를 출력한다. TTL 신호는 디지털 소자의 입력신호롤 사용되며 0~5V 크기의 구형파 펄스이다. TTL 출력으로는 전압의 크기 조절이 불가능하며, 삼각파나 정현파와 같은 형태의 파형은 출력되지 않는다. TTL출력에서는 파형의 주파수만 조절 가능하다.
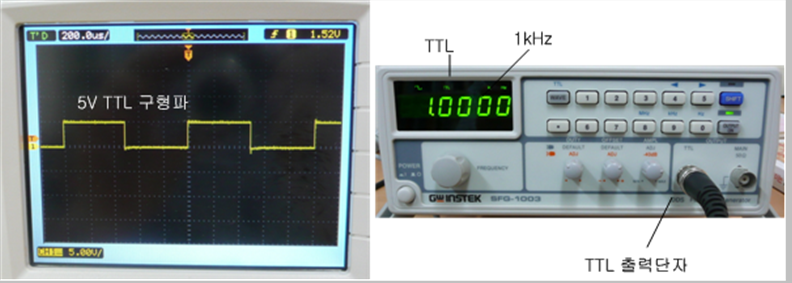
[그림] TTL 출력파형
5) 메인 출력 :  BNC 케이블을 통해 정현파, 구형파, 삼각파 형태의 다양한 파형을 출력할 수 있다. TTL출력과 다르게 파형의 크기, 형태와 오프셋도 조절 가능하다.
BNC 케이블을 통해 정현파, 구형파, 삼각파 형태의 다양한 파형을 출력할 수 있다. TTL출력과 다르게 파형의 크기, 형태와 오프셋도 조절 가능하다.

[그림] Main 출력 단자를 통한 1kHz, ±10V구형파 발생

[그림] Main 출력을 통한 삼각파, 정현파 발생
6) 크기 조절  : Main 출력 단자를 통해서 파형을 발생시킬 때 파형의 크기를 조절 할 수 있다.
: Main 출력 단자를 통해서 파형을 발생시킬 때 파형의 크기를 조절 할 수 있다.
7) DC offset 조절 :  Main 출력 단자를 통해 파형을 발생시킬 때 파형의 오프셋을 조절할 수 있다. 기본적으로는 오프셋 전압은 0V로 파형은 +전압의 크기와 – 전압의 크기가 동일하게 발생한다. 그림의 경우 파형의 최대-최소 크기가 10V이며 오프셋이 0V인 ±5V의 정현파가 발생하고 있다. 오프셋 단자를 당겨서 돌리면 DC offset전압을 인가할 수 있게 되고 그림과 같이 오프셋을 5V를 인가할 경우 파형이 0~10V의 크기를 갖는 정현파로 바뀌게 된다.
Main 출력 단자를 통해 파형을 발생시킬 때 파형의 오프셋을 조절할 수 있다. 기본적으로는 오프셋 전압은 0V로 파형은 +전압의 크기와 – 전압의 크기가 동일하게 발생한다. 그림의 경우 파형의 최대-최소 크기가 10V이며 오프셋이 0V인 ±5V의 정현파가 발생하고 있다. 오프셋 단자를 당겨서 돌리면 DC offset전압을 인가할 수 있게 되고 그림과 같이 오프셋을 5V를 인가할 경우 파형이 0~10V의 크기를 갖는 정현파로 바뀌게 된다.
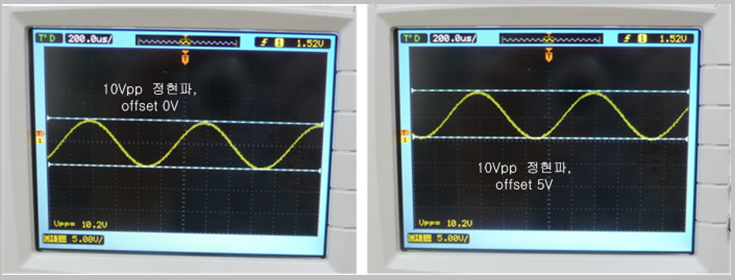
[그림] 크기 및 DC offset 조절
이 노브를 밀어서 집어넣으면 offset은 기본 설정값으로 돌아가는데 파형의 중간이 0V가 된다. 다시 조절하려면 당겨서 뺀후 조절하면 된다.
8) 듀티 비 조절 :  Main단자의 구형파 출력 또는 TTL출력의 경우, 기본적으로는(노브가 밀어서 들어가 있는 상태에서는) 듀티 비가 50%로 설정되어 있다. 즉 + 전압 발생 시간과 –전압의 발생시간이 동일하다. 하지만 듀티비 조절 단자를 당겨서 돌릴 경우 + 전압의 시간과 – 전압의 시간을 상이하게 할 수 있으며 이를 듀티 비 조절이라고 한다.
Main단자의 구형파 출력 또는 TTL출력의 경우, 기본적으로는(노브가 밀어서 들어가 있는 상태에서는) 듀티 비가 50%로 설정되어 있다. 즉 + 전압 발생 시간과 –전압의 발생시간이 동일하다. 하지만 듀티비 조절 단자를 당겨서 돌릴 경우 + 전압의 시간과 – 전압의 시간을 상이하게 할 수 있으며 이를 듀티 비 조절이라고 한다.
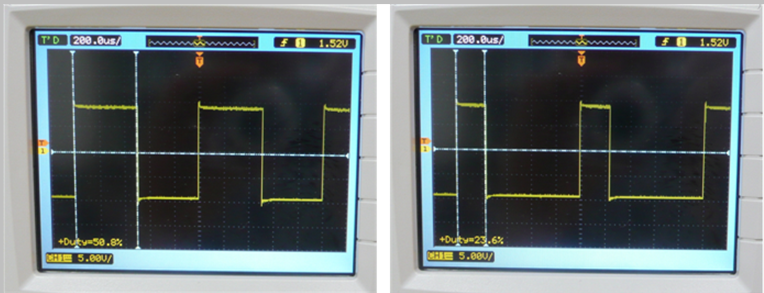
[그림] 듀티비 조절
9) Shift Key :  입력 키 버튼의 2번째 기능 (파란색 글씨)을 선택하고자 할 때 Shift Key를 누르고 해당하는 입력 키를 누른다.
입력 키 버튼의 2번째 기능 (파란색 글씨)을 선택하고자 할 때 Shift Key를 누르고 해당하는 입력 키를 누른다.
10) Output ON/OFF 키 :  출력 파형의 On/Off를 제어할 수 있는 버튼으로 OUTPUT ON이 되어 있을 경우에만 출력 파형이 발생한다.
출력 파형의 On/Off를 제어할 수 있는 버튼으로 OUTPUT ON이 되어 있을 경우에만 출력 파형이 발생한다.
'교육 > 전기전자' 카테고리의 다른 글
| 디지털멀티미터 개요 (0) | 2017.01.10 |
|---|---|
| 빵판 (bread board) (0) | 2017.01.09 |
| 오실로스코프 커서측정 (0) | 2017.01.09 |
| 오실로스코프 자동측정 (0) | 2017.01.09 |
| 오실로스코프 트리거 제어 (0) | 2017.01.09 |





























