3.5 채널 커플링 컨트롤
오실로스코프의 채널 커플링은 3가지 모드가 있다.
DC커플링은 실제 파형을 그대로 표시한다,
AC 커플링은 DC 오프셋(offset) 전압을 제거한 교류 파형을 나타낸다.
마지막으로 GND 커플링은 입력 파형을 차단하고, GND 파형을 표시한다.
일반적으로 파형의 실제 형태 및 크기를 측정하고자 할 때는 DC 커플링 상태를 사용한다. 그리고 화면에서 GND (0V) 위치를 파악하고 위치를 이동하고자 할 때는 GND 커플링을 선택한 후, 수직 위치 노브를 조정하여 GND 위치를 움직일 수 있다. AC 커플링은 측정하고자 하는 신호가 기본적으로 DC 오프셋 전압을 가지고 있고 작은 교류 신호가 중첩되어 있을 때 사용한다. 이 때 DC 커플링 상태에서는 작은 교류 신호가 잘 나타나지 않기 때문에, AC 커플링을 사용하여 DC 오프셋 전압을 제거하고 수직 크기 노브를 조절하여 작은 교류 신호를 확대하여 정확히 측정할 수 있다.
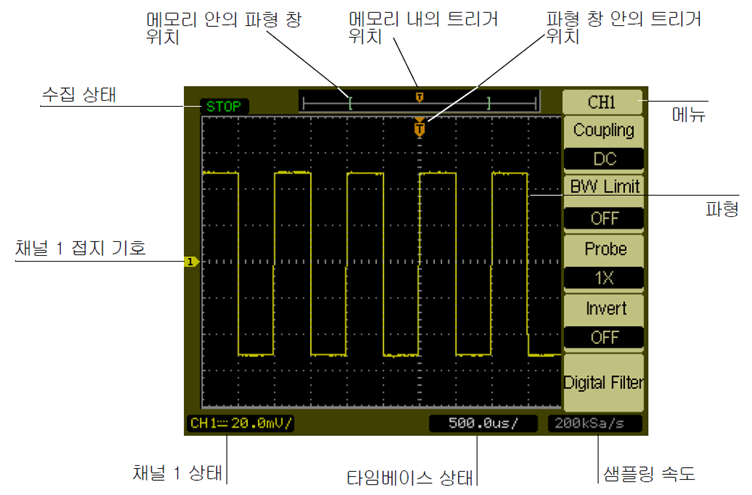
커플링 선택은 메뉴 버튼을 누르고, 나타난 커플링 메뉴에서 선택한다.
1) AC 커플링 : DC 오프셋 전압을 입력 파형으로부터 제거
• 우측의 메뉴에서 AC 커플링임을 확인할 수 있고, 또한 아래 상태 표시줄의 교류 기호에서 AC 커플링 상태임을 나타낸다.

[그림] AC커플링 상태
2) DC 커플링 : 실제 입력 파형 (AC 및 DC 컴포넌트) 표시
• 우측의 메뉴에서 DC 커플링임을 확인할 수 있고, 또한 아래 상태 표시줄의 직류 기호에서 DC 커플링 상태임을 나타낸다.

[그림] DC 커플링 상태
3) GND 커플링 : 파형 차단
• 우측의 메뉴에서 그라운드 커플링임을 확인할 수 있고, 또한 아래 상태 표시줄의 접지 기호로 GND 커플링 상태임을 나타낸다.

[그림] 그라운드 커플링 상태
'교육 > 전기전자' 카테고리의 다른 글
| 오실로스코프 수평축 설정 (0) | 2017.01.09 |
|---|---|
| 오실로스코프 반전제어 (0) | 2017.01.09 |
| 오실로스코프 수직 설정 (0) | 2017.01.09 |
| 오실로스코프 프로브 보상 (0) | 2017.01.09 |
| 오실로스코프 제어판 및 디스플레이 (0) | 2017.01.09 |