3D프린팅을 하다 보면 인쇄물이 밑판(베드)에 너무 단단하게 붙어버려서 이걸 떼어내는데 굉장히 힘들거나 아예 안 되는 경우도 종종 발생한다. 이것을 해결하기 위해서 youtube에서 검색을 좀 해보면 얼음팩으로 접합면을 식힌 다음에 망치같은 것으로 살살 쳐서 떼어내는 동영상도 있던데 훨씬 간단한 팁을 발견해서 여기에 소개하도록 하겠다.
바로 헤어스프레이를 bed에 뿌린 다음에 그 위에 인쇄를 하는 것인데 이게 의외로 효과적이다. 별다른 힘을 들이지 않고 인쇄물을 떼어낼 수 있다. 헤어스프레이 자체가 접착력이 있기는 한데 그 힘이 별로 크지 않기 때문에 서포트가 살짝 bed에 달라 붙게 되는 것이다.
필자는 UP! plus 라는 프린터를 사용하고 있는데 이것에는 갈색 플라스틱으로 된 밑판(bed)이 몇 장 딸려온다. 이것에는 조그만 구멍이 격자모양으로 뚫려 있어서 프린트할 때 서포트가 잘 달라붙도록 되어있는데 종종 너무 밀착되어 떼어내기가 매우 힘든 경우가 있다. 분리하는 도구(끝이 칼날로 된 주걱)가 딸려오기는 하는데 이것을 사용해도 떼어내기가 쉽지 않은 경우가 많다.
그래서 위 동영상에 나온대로 마트에서 헤어스프레이를(strong 형으로. 마트에서 몇 천원이면 살 수 있다.) 구입한 후 살짝 (5초~10초 정도) 골고루 뿌린 다음 인쇄하면 인쇄물이 베드에서 뜨지 않고 서포트가 너무나 쉽게 분리가 되서 아직까지는 편하게 사용하고 있다.
'3D프린팅' 카테고리의 다른 글
| 인벤터로 모터마운트 설계 (0) | 2015.06.10 |
|---|---|
| 인벤터에서 3d 프린팅을 위한 stl 파일 생성할 때 주의할 점 (0) | 2015.06.06 |
| 3d 프린터 rexbot (oc-120) 개봉기 (0) | 2015.06.06 |
| 초저가 델타형 3D프린터 Tiko (0) | 2015.04.29 |
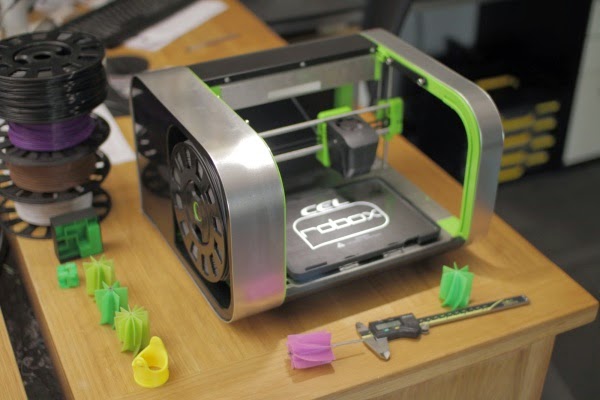
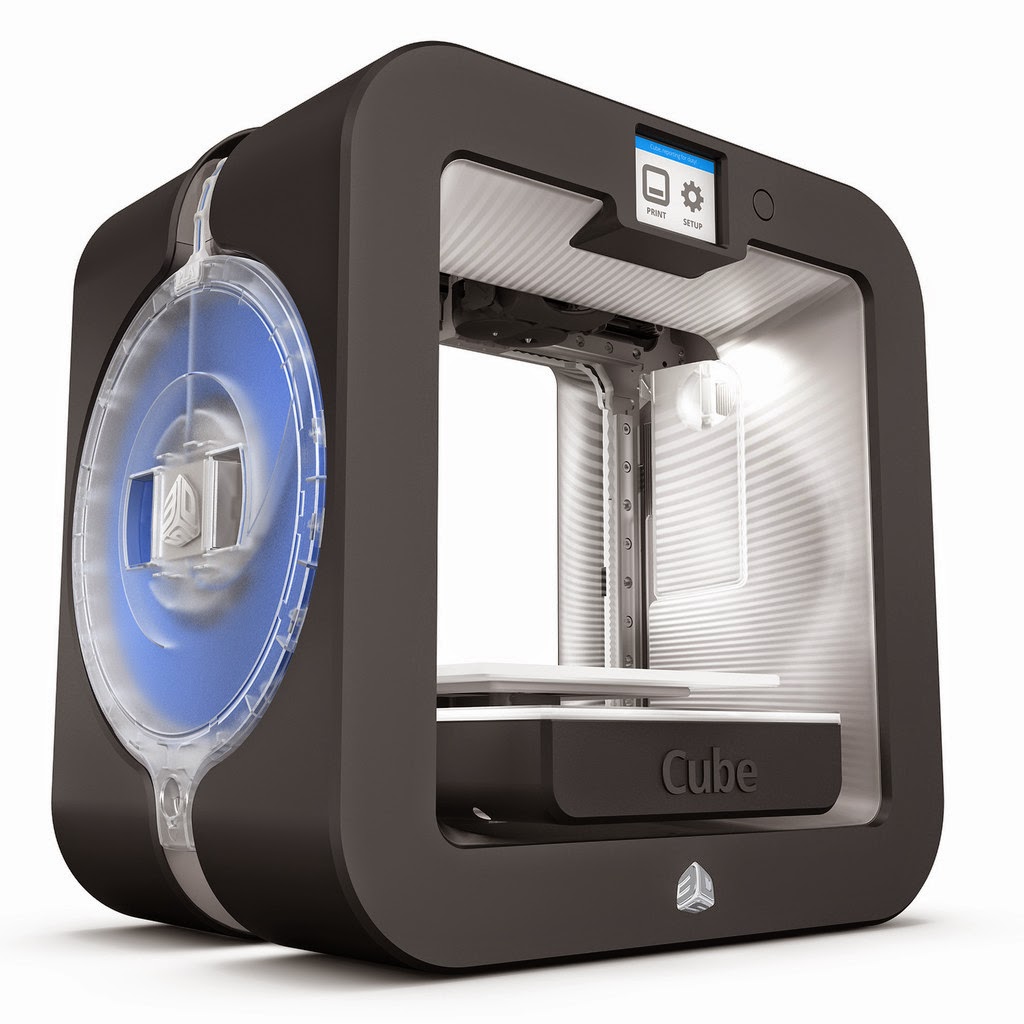
| 3D 프린터 robox 와 3세대 cube (0) | 2015.04.27 |